01轨道交通制动系统的发展及其规律

制动系统的发展
从19 世纪初蒸汽机车所采用的人力制动到今天高速列车所采用的微机控制直通电空制动系统,轨道车辆制动系统技术的每一次重大变革不外乎围绕着制动力的源动力改变或制动指令传输方式的变化。
早期蒸汽机车和车辆的制动一直采用人力制动,即制动员按照司机的笛声指令,以人力作为源动力通过转动制动手轮绞动制动钢丝,使闸瓦贴靠车轮踏面,从而产生摩擦力使得车轮转动减慢直至停止。由于手制动机存在制动力弱,不能由司机一人操作等缺陷,很快就被非人力的制动机所替代。
1844 年,英国铁路用真空制动机取代了手制动机。真空制动机是以大气压作为制动力的源动力,利用真空度造成的负压推动制动缸带动闸瓦贴靠车轮踏面,以施加制动。真空制动系统在机车上设有真空泵、制动阀和真空制动缸,在车辆上则仅有真空制动缸,整列车的制动缸全部用制动管连通。司机通过操纵制动阀改变制动管中的真空度,此时真空制动缸中便产生压力差,从而实施阶段制动或缓解。这种制动系统的特点是构造简单,但制动力不大,而且海拔越高制动力越小。
1869 年,美国乔治 韦斯汀豪斯制造了人类第一台直通式空气制动机,开启了采用压缩空气作为制动力的源动力时代,即空气制动系统时代。直通式空气制动机使制动力上限突破了大气压的限制,其产生的制动力远高于真空制动机。
1872 年,乔治 韦斯汀豪斯在直通式空气制动机的基础上增设给气阀、三通阀和副风缸后发明了自动空气制动机,它不但克服了直通式空气制动机在列车分离时的安全性问题,而且实现了空气制动机性能的飞跃。自动空气制动系统以压力空气作为制动信号传递以及制动力施加的介质,即司机通过控制列车管压力的增减传递缓解或制动指令至各车辆的三通阀,三通阀通过控制压缩空气通路使制动缸压力排向大气或使副风缸内的压缩空气充入制动缸,实现列车的缓解或制动。
自动空气制动机的性能随着其关键部件三通阀结构的升级换代而不断提升,历经一个多世纪延续至今。自动空气制动机采用压缩空气作为制动力的源动力,基本满足了列车吨位提高对加大制动力的需求;但由于制动信号也借助于列车管内压力的变化传递,随着对列车制动过程中舒适性要求的提升或列车编组的增加,已难以满足轨道交通车辆的发展需求。因此,20 世纪中叶开始出现了电空制动机,即在保留以压缩空气作为制动力的源动力基础上用电信号传递制动指令,使列车上各辆车的制动响应和一致性得到明显提升。
随着计算机技术的发展,20 世纪80 年代开始出现微机控制直通式电空制动系统。它不但使传递的制动指令更加丰富、可靠,而且使制动过程的控制更符合安全、可靠、舒适的要求,基本满足了城轨和高铁等高端列车的需求。

制动系统的发展规律
从近2 个世纪的轨道交通制动技术发展历程可以看出,轨道交通车辆制动机发展的脉络沿着制动力的源动力和制动指令传递方式2 个维度演进,如下图所示。
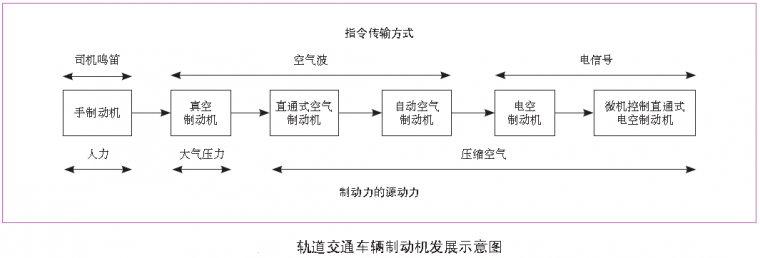
制动力的源动力发展已经历了由人力到大气压力,再到压缩空气(在一些特殊车辆上,由于安装空间等因素,也有用液压这种压力流体替代)的演变历程,无论是可实现的最大制动力还是制动性能都有了大幅度的提高。但是,这类制动系统(以微机控制直通式电空制动系统为例)的制动指令和制动力施加仍然需要经过电空转换的环节和压缩空气的作用环节,即首先将电信号通过电空阀(EP 阀)转换为预控压力信号,再经过中继阀放大流量后,压缩空气才能按指令进入制动缸内,推动制动缸的活塞杆移动,从而带动闸瓦贴靠踏面或闸片贴靠制动盘,最终通过轮轨关系形成制动力。这一制动力的建立过程需要较长时间(1 ~ 3 s),不但响应慢,而且控制精度受空气压力和制动缸摩擦阻力等因素的影响极大,更是难以实现空气部分和基础制动的实时监控,致使系统的智能控制和智能维保举步维艰。因此,空气制动系统已经很难再发生根本性的变革。
制动指令传递方式从以司机鸣笛声为信号进化到利用列车制动管压力变化的空气波沿列车长度方向传递,使列车制动实现了司机一人操纵的基本要求;在空气波传播速度的范围内提高了列车制动、缓解的一致性。但随着列车编组、载重的不断增加,以空气波传播速度为极限的制动指令传输方式严重影响了列车的制动性能和乘坐舒适性。当制动指令传递方式升级为利用电信号的变化,其传播速度提升了近100 倍。这不但可极大地提高列车的制动性能和乘坐舒适性,而且开启了列车制动信号智能化的演进。
电机械制动技术
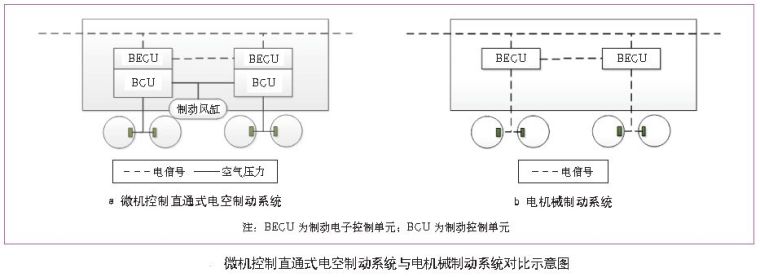
电机械制动(EMB)技术是一种利用电能直接驱动基础制动中的摩擦副产生摩擦力,从而使得运动减缓或停止的制动技术。它是一种能够替代空气制动系统的新型制动系统,既继承了电空制动系统的制动指令传递方式,又直接用电能作为制动力的源动力,通过电动机驱动闸瓦或闸片。其中,电动机可由电信号直接控制,中间不需要通过空气(液压)的转换、放大(下图)。同时,电机械制动将电能直接驱动机械摩擦副,真正地实现了轨道交通车辆制动系统的全电气化。这使得制动系统的响应和控制精度在空气制动系统基础上大幅提升,使制动过程的智能化控制和系统的智能化维保成为可能,必将成为新一代制动系统的发展方向。
02EMB 技术应用现状
EMB 系统在航空、汽车和轨道交通领域都有代替原空气、液压制动系统的趋势。其中,航空、汽车领域已有成熟产品推广运用,轨道交通领域还处于研发阶段,尚未投入市场。
航空领域
EMB 技术最早是在航空领域提出的,被称为飞机的全电刹车。20 世纪70 年代提出多电飞机(EMA)的概念,当时称为全电飞机。多电飞机是基于优化整个飞机动力系统的设计需要而发展的概念,指的是将飞机的发电、配电和用电集成在一个系统内,实行发电、配电和用电系统的统一规划、统一管理和集中控制。
由于多电飞机的发展需求,功率电传(PBW)技术应运而生。功率电传是指利用电功率代替飞机上的其他能源驱动机上的各种作动系统,其中包括飞行控制系统中的作动器、起落架收放装置、防结冰装置、刹车装置、环境控制发动机起动和燃料泵等。也有人认为,电传操纵(FBW)加上功率电传就是全电飞机。功率电传作动器的种类主要有3 种:机电作动器(EMA)、电静液作动器(EHA)、电液伺服泵作动器(ESPA)。目前关于功率电传作动器的研究主要集中在EMA 和EHA上,其中,EHA 作为液压系统的备用系统已经在许多飞机上得到应用。相较于EHA,EMA 完全取消了液压部件,维修费用更低,被认为是一种更经济实用的功率电传作动器。
基于多电飞机的发展需求,同时伴随永磁材料、大规模功率器件和微处理技术的进一步发展,20 世纪80 年代人们开始进行全电防滑刹车系统的探索。首先是美国空军与飞机刹车系统公司Loral Aircraft Braking Systems 的电刹车研究,1982 年在A-10 攻击机上成功进行了一系列测试。1998 年12 月8 日,美国Goodrich公司与美国空军合作,在爱德华空军基地成功试飞了第一架装有全电防滑刹车系统的F-16C 飞机。2002 年,Honeywell Aircraft Landing Systems 公司的全电刹车系统在X-45A 原型无人作战机上完成首次成功试飞,预示全电刹车技术已经较为成熟。2008 年,庞巴迪公司对装备了英国Meggitt 集团的全电刹车系统验证机成功地进行了首次飞行试验,成为民用航空的重要标志事件。
目前,全电防滑刹车系统已成功应用在大型民航飞机上,如波音787。
汽车领域
汽车领域EMB 技术的研究兴起于20 世纪90 年代,这一研究最初是由世界上一些知名的汽车公司发起的。2001 年,瑞典SKF 集团展出的第一款Bertone-SKFFILO 概念车使用了SKF 的线控技术。2002 年,美国通用汽车公司推出装有EMB 系统和燃料电池的Autonomy(自主魔力)跑车。2004 年,德尔福公司研发了一种通过电动制动钳操控后轮制动的混合线控制动系统。2005 年,世界上第一款安装EMB 系统的汽车由澳大利亚PBR 公司开发。之后,这家公司又与美国通用汽车公司合作开发了Sequel 概念汽车,其安装了EMB系统。
EMB 系统最早应用在混合动力制动系统车辆上,采用液压制动和电制动2 种制动系统,这种混合制动系统是全电制动系统的过渡方案。布雷博公司在2012 年北京车展上展出的制动系统和奥迪公司的R8 e-tron 量产车都是采用前轮液压、后轮电机械制动的方案。由于2 套制动系统共存,使系统结构复杂,成本偏高。
EMB 技术在汽车上的另一个应用是电机械驻车制动系统(EPB)。传统的机械式驻车制动系统是通过司机操纵驻车手柄,带动制动蹄片张开或制动卡钳活塞移动完成驻车的,其制动力完全来自司机,而EPB 系统则是通过电动机施加制动力,驻车时司机只需操作按钮(EPB 开关),由电子驻车制动系统中的 ECU 控制电动机工作完成驻车制动的。EPB 最早是由美国天合公司(TRW)开发的,2001 年在菲亚特中高档轿车Lancia 上开始使用,现已成为北美和欧洲众多车型的标准配置。

03轨道交通EMB 技术的发展
轨道交通车辆制动系统发展至今,已经完成了传输制动指令的电气化。对于制动力施加的电气化,目前已经出现了电阻制动、再生制动、涡流制动等,但是这些涉及 电的制动方式,由于其本身特点、适用局限性或者经济性和合理性因素,至今难以成为列车的安全制动方式。而制动系统最重要的使命是保证轨道车辆的安全性,确保在任何突发情况下,轨道车辆都能够在规定的距离内安全停车。电机械制动系统作为原有空气制动系统的替代品,能够在保证安全制动的前提下,实现制动系统的全电气化。
EMB 系统主要包含电机械夹钳单元、制动控制装置和辅助缓解装置3 个模块。
电机械夹钳单元包括电机械制动缸和基础制动装置,基于原空气制动夹钳单元接口进行匹配性设计,由电机械制动缸替代原空气制动缸。一般每辆车设置8 套。
每个制动控制装置包括EBCU 板卡组、电机械控制单元板卡组、备用电池及电源管理板卡等,可以根据整车设计的需要每辆车设置1 套或每个转向架设置1 套。
辅助缓解装置用于实现手动缓解及制动隔离功能,即通过安装于车厢内的隔离/ 缓解按钮或车辆底架的辅助缓解装置操控停放制动的缓解及实现制动隔离。在手动缓解状态下,电动机的输出力允许超过断电锁死机构的最大锁止力。辅助缓解装置与制动控制装置具有互锁功能。
EMB 技术是轨道车辆领域一种全新的制动技术。国外曾有公司在二十几年前做过探索,但由于当时的电子电器技术等因素致使研究没有继续。近年来,由于相关基础技术的突飞猛进,以及该技术在飞机、汽车等交通工具中的成功应用,为该技术在轨道交通车辆中的研发、应用奠定了基础和范例。
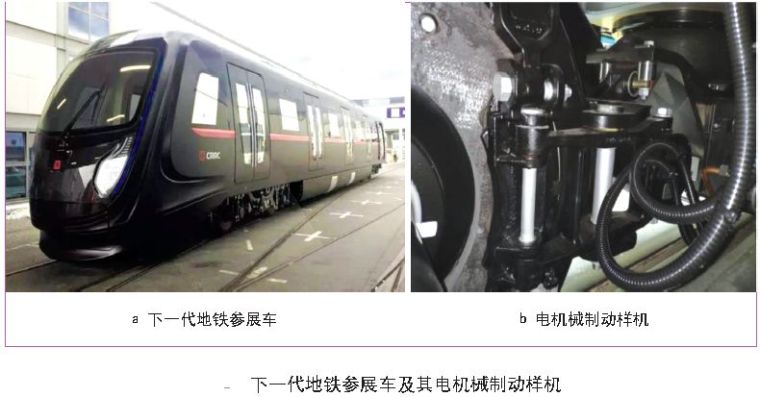
上海六辔机电科技有限公司和同济大学的一些师生,自2014 年起开始进行适用于轨道交通车辆EMB 技术的自主研究、系统开发及样机研制。他们研制的第四代电机械制动样机(采用盘形制动形式),作为中国中车青岛四方机车车辆股份有限公司下一代地铁样车的一部分在2018 年德国柏林轨道交通技术展InnoTrans 中展出,如下图所示。目前,该团队正在进行系列化的样机研发,包括适用于高铁、地铁、低地板有轨电车、中低速磁悬浮等各种轨道车辆的电机械制动样机。
04轨道交通EMB 技术优势和前景展望
EMB 技术因其本身具有的独特优势,为轨道车辆制动的发展提供了新的发展方向。
技术优势
EMB 系统极大地提高了轨道车辆的制动性能。在目标制动力的响应时间上,采用电动机驱动的EMB 系统相比于空气制动系统缩短了70% 以上,参见下图。
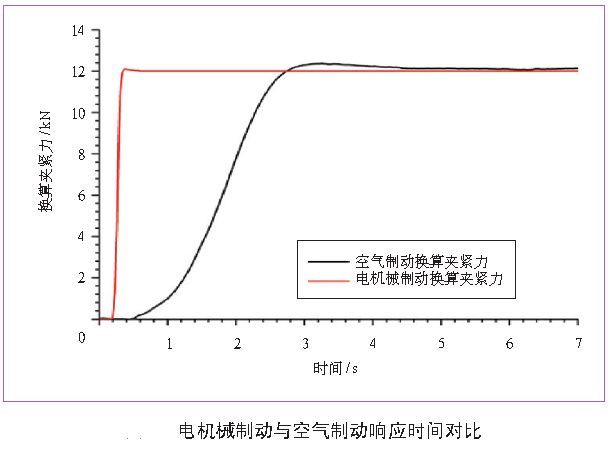
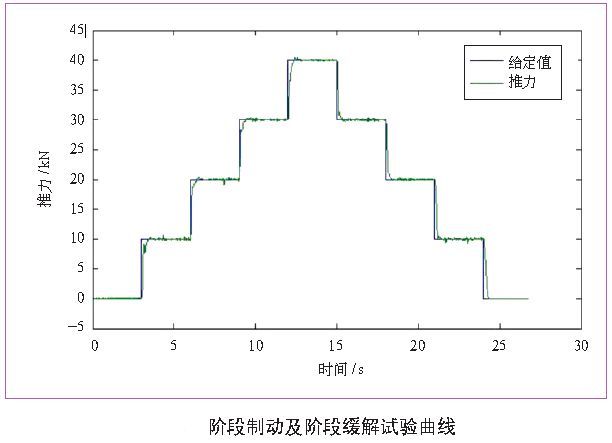
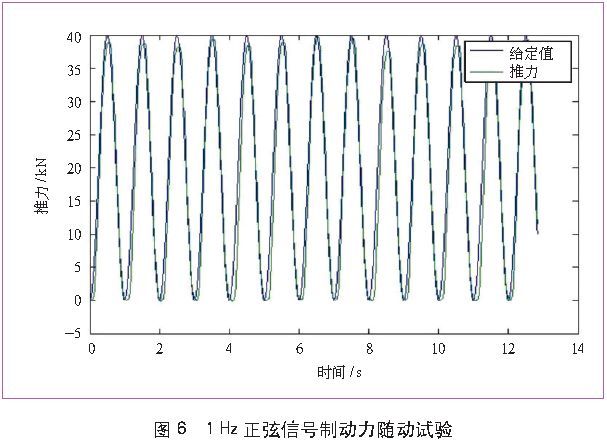
相比于空气制动系统的强非线性(制动缸压力精度20 kPa)和大时滞特性(响应延迟在1 s 以上),电机械制动系统完全弥补了上述2 点的不足,见下图 中阶段制动与阶段缓解过程中电机械制动制动缸的推力与制动指令的跟随性。试验台试验结果证明,电机械制动系统不但制动力控制精度高,而且其响应速度能够跟随频率按1 Hz正弦变化的目标指令,如下图所示。
EMB 系统可实现轮控,每个电机械夹钳单元都可以独立控制,其制动力冗余度极高。
EMB 技术能够实现高精度制动闭环控制,也可以实现列车级制动力分配策略优化。EMB 系统由于其响应迅速、控制精度高等特点,为研究新型的智能防滑控制创造了条件。如需利用防滑过程中黏着系数的改善效应,就需要更高精度、更快速度的防滑控制,EMB 系统则能够达到上述的要求。
EMB 模块化与轻量化的设计,简化了制动系统的结构,取消了气路管路、风缸、阀组、塞门等,每辆车的质量减小了200 kg以上。
EMB 技术采用电能直接转换为机械能产生摩擦力的方式,中间无须将电能转化为气体或液体的压力能,降低了制动力传输过程中的效率损失,提高了能源利用率。
EMB 系统实现了制动系统的全电气化。因此可对制动系统进行全面检测以及智能诊断,做到对系统动态信息的实时感知,实现对故障的快速定位与处理。EMB 系统的易检测和模块化功能为实现智能运维奠定了基础。
前景展望
我国轨道交通装备建设已进入高峰期,城市轨道交通领域也进入发展快车道,制动系统的技术应用和市场需求将大幅提升。目前,我国在轨道交通装备的规模上已领先于世界各国,但就轨道交通装备技术水平而言,与世界先进国家相比,我国还处于跟随与平齐的位置。作为新一代制动技术的EMB 系统,目前国际上尚未有成熟的产品投入运用。因此,发展EMB 技术是我国在轨道交通车辆装备关键系统技术上的一次原始创新,如能投入应用,将是我国在轨道交通车辆装备关键系统上的一次技术引领。这对提升中国制动产品的核心竞争力,并带领整个制动产业向精细化、智能化发展具有重大意义。
参考文献
吴萌岭,周嘉俊,田 春,等. 轨道交通制动系统创新技术[J].现代城市轨道交通,2019(7):30-35.
